
EVO-4 soll eine Lenkung bekommen, die das Potential hat, etwas eingestellt werden zu können. Da EVO-4 durch sein voraussichtliches Gewicht von ca. 200kg satte 30-50% schwerer ist, als übliche Karts ist zu erwarten, daß die übliche Lenkgeometrie evtl. nicht ganz so optimal ist. Und da das Chassis an der Stelle, wo die Lenkdrehachse sitzt sowieso neu gebaut werden muß, weil alle vorhandenen Teile eben nicht zusammenpassen, könnte man sich mit diese Stelle auch etwas mehr beschäftigen.
Als erstes versuche ich herauszufinden, was "üblich" ist. Da sind z.B. Sturz, Spreizung, Nachlauf, Achsabstand, Lenkeinschlagwinkel. Sturz kann man eigentlich nur einstellen, wenn man den Winkel der Lenkdrehachse zur Radrollachse verstellbar macht. Das ist aufgrund der sehr engen Platzverhältnisse an dieser Stelle sicher nur durch den Tausch von vorgefertigten Teilen aus einem Sortiment mit unterschiedlichen einkonstruierten Sturzwerten möglich. Die Spreizung korrespondiert mit dem Sturz direkt, wenn man das Rad senkrecht zur Bahn laufen lassen mächte. Diese beiden Werte einstallbar zu machen halte ich für zu aufwendig. Da muß es andere realisierbare Möglichkeiten geben...
Bei EVO-3 habe ich an dem alten Chassis den Nachlauf einstellbar. Das hatte den Vorteil, daß ich den weichen Rahmen doch durch Vergrößern des Nachlaufen überreden konnte, einigermaßen gutmütig um eine Kurve fahren zu wollen. Das hat viel möglich gemacht und ich möchte dies bei EVO4 realisieren. Den Achsabstand von 1040mm am Chassis möchte ich möglichst auch behalten, weil ich denke, daß das Kart dadurch agiler um eine kleinere Kurve zu bewegen ist. Kartbahnen haben nunmal selten nur lange Kurven. Das mit dem Achsabstand ist eine Theorie, die nicht alle teilen - nun, warten wir's eben ab, bin gespannt :-)
Der Lenkeinschlagwinkel ergibt sich einfach dadurch, daß ein Kart um eine Kurve fahren muß und alle Räder möglichst rollen sollten. Den möglichen Einschlagwinkel von ca. 30Grad des äußeren Rades bei EVO3 hab ich eigentlich nur beim Rangieren im Fahrerlager genutzt - auf der Bahn (aus dem Lenkraddrehwinkel abgeleitet) selten mehr, als vielleicht 15Grad. Mache ich also 20Grad möglich, dann sollte das reichen.
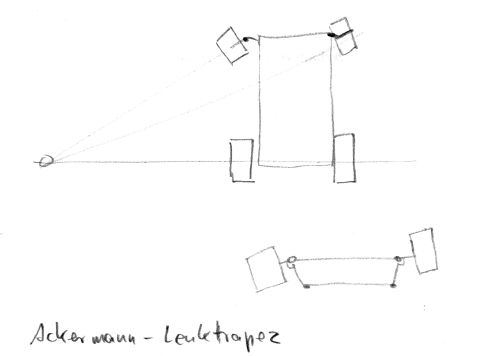
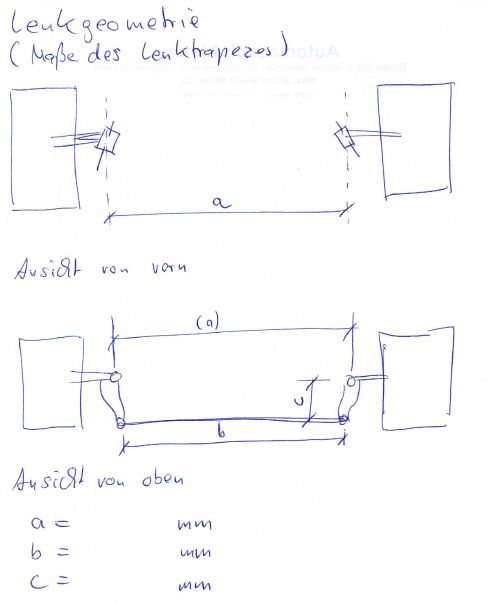
Beschäftigt man sich mit Lenkgeometrie, dann kommt man schnell auf das Lenktrapez, benannt nach einem Hr. Ackermann (der nicht der Erfinder, sondern der ermächtigte Patentanmelder war). Das Lenktrapez ist wohl die vereinfachte und ausreichende Berechnungsgrundlage für die Lenkgeometrie von EVO4.
Nachdem ich mir so die Trigonometrie angefangen hab herzuleiten, fiel mir ein, daß es ja sowas, wie Google gibt. Die zweite Seite war schon die, die ich gleichmal verlinken muß:
Ich werde mir diese Arbeit nicht machen (ehrliches Dankeschön Hans-Gerd) und mit der sehr guten Ausarbeitung meine weitere Lenkgeometrieauslegung durchführen. Dazu hab ich mir einige Vergleichsdaten bei Freunden angefragt...
... und festgestellt, daß diese Daten irgendwie der Theorie der rollenden Räder des Ackermannprinzips nicht wirklich entsprechen... Und nu?
Ganz einfach. Ich nehme mir ein Mittel aus den Werten der Karts meiner Kumpels. Und zwar die, die mir eine gutmütige Kurvenfahrbarkeit bestätigt haben oder die Karts aktuellen Datums mit unveränderten Lenkgeometrien benutzen. Ich ergänze Hans-Gerd's berechnugen um meine speziellen Daten und Berechnungen und bekomme so die Werte, die ich für die Lenkung an EVO-4 benötige.
Und ... ich befrage meinen "Profi" Ingo, der ein paar Jahre in der ODKM, und ab Schluß auch gut, dabei gewesen ist. Er bestätigt mir, daß die Einstellungen der Lenkgeometrien mit den Erfahrungen seiner "Rumstellereien" gut überein stimmen. Zusätzlich aber rät er mir, eine Einstellmöglichkeit zu finden, daß die Vorderreifen in Kurven möglichst auf voller Breite tragen. Das geht nur mit einer Einstellmöglichkeit für den Sturz. Hmmm. Sturzverstellmöglichkeiten wollte ich eigentlich nicht vorsehen, weil's mir zu aufwendig erscheint. Andererseits ... soll man doch die Erfahrungswerte eines Profis genauer in Augenschein nehmen. Ich guck auf die Vorderräder von EVO-3. Die sind eigentlich eher schief abgefahren. Das kann nicht gut sein. Mindestens die Verwendungsdauer der Reifen wird dadurch rediziert, weil der Belag innen schnell ruterradiert ist - und dann kommt's Gewebe. Weiterhin kann ein Reifen nur gut funktionieren, wenn die Lauffläche vollständig benutzt wird. Und, wenn sie eben auf voller Breite "klebt". Und das Kleben kann man nur über die Temperatur erreichen - und die stellt man sinnvollerweise durch Walken ein - nicht durch Rubbeln oder Rutschen. Bei den schief abgefahrenen Reifen von EVO-3 steht außer Frage, das die äußeren Bereiche eben nicht ausreichend walken können - also zu kalt sind - die inneren walken viel und sind vielleicht zu warm. Egal - der Reifen ist nicht über die gesamte Lauffläche gleichmäßig warm - das ist schlecht. Ahaaaa... Also - Sturz muß einstellbar sein! Auf geht's!
Als erstes muß mal die Bremszange an den Achsstumpf, damit ich weiß, welchen Bewegungsraum sie einnimm, wenn das Vorderrad geschwenkt wird. Alle anderen Bauteile müssen das zulassen - und so weiß ich, welche Größe die anderen Bauteile haben dürfen. Ich fange mal ... exemplarisch mit dem rechten Vorderrad an. Wenn das sitzt, kommt das spiegelbildlich zu fertigende linke Vorderrad dazu. Die alten Achschenkel haben Aufnahmen für die passenden Bremszangen des ZIP-Karts - die passen natürlich nicht für die Zangen der FZ750. Umbau geht nicht einfach, da die FZ750-Zangen breiter sind. Also schweren Herzens - ab damit! Die Flex wird ausgepackt.

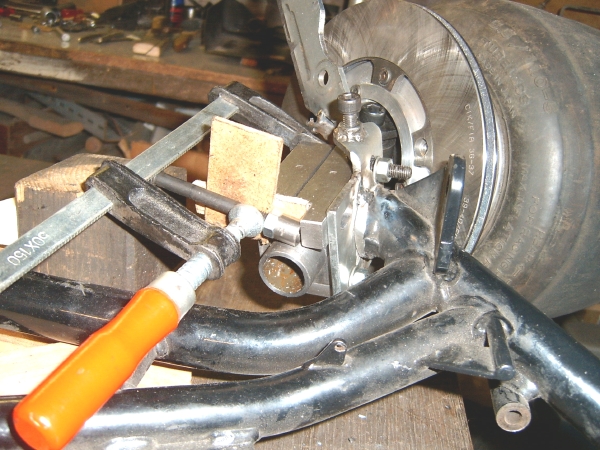
Die Halterung für die Bremszange wird per Pappschablone ermittelt. Dazu wird die Bremszange auf die Bremsscheibe gesteckt. Die Distanzplatten ragen innen etwas in Richtung Bremsscheibe (siehe Bremse). Damit sitzt die Bremszange auf minimalem Abstand zur Scheibe, wenn die Ansätze im Nachhinein abgefräst werden. Die Distanzplatten sind so schmal, daß sie in die Kühlrippenzone der Scheibe gut sitzend einrasten. Dann wird die Bremszange aufgepumpt, so daß die Beläge an der Scheibe anliegen. Eine einfachere Positionierung ist mir nicht eingefallen (*prahl* ). Aus der Pappschablone werden zwei Halter aus Stahl gefertigt.
Die Löcher für die Zangenhalteschrauben werden mit möglichst wenig Bohrungs- und Achsabstandstoleranz gebohrt, damit es nicht zu unerwünschten Schräglagen kommt.


Dann wird die Zange zusammen mit dem Stahlhalter positioniert und per Drahtspannvorrichtung fixiert. Jetzt wird angeschweißt.


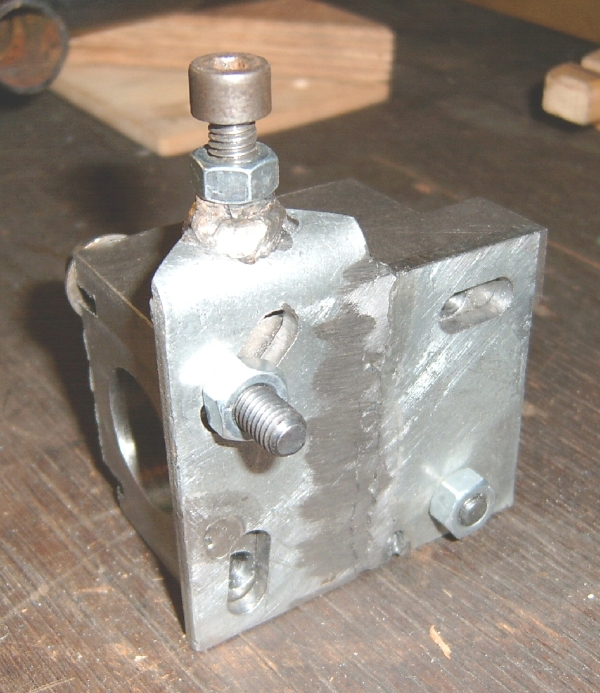
Anschließend wird die Zange demontiert und die "Lagerfaust" bekommt einen "Lagerarm" angepunktet. Dieser Lagerarm soll in einen Klemmbock gesteckt werden.


Der Klemmbock wiederum wird an eine Halteplatte verschraubt - und zwar mit 4 Bolzen nebst selbstsichernden Muttern (hier noch nicht dargestellt). Die Halteplatte wird fest am Chassis angescheißt werden. Der Klemmbock soll den Lagerarm klemmen. Das wird er können, wenn er in der Mitte vertikal axial durchgesägt wird. Das kommt aber erst später, wenn die gesamte Konstruktion ausgerichtet und die Abbohrarbeiten erfolgreich durchgeführt wurden. Das wird dann die Verstellung für den Nachlauf.

An der Lagerplatte erkennt man, daß drei Bohrungen Langlöcher sind. Die vierte Bohrung soll einen Drehpunkt für den Lagerbock darstellen. Die oben mit einer Mutter konterbare M8-Schraube bildet eine Möglichkeit den Lagerbock fein zu justieren. Das ist die Sturzenstellung.
Nun wird das erste Mal am Chassis angepaßt. Hier muß die vorhandene U-Lagerplatte abgeflext werden. Um eine möglichst genaue Positionierung zu haben, wird nicht das Chassisrohr einfach "wild" durchtrennt, sondern die über den Rohrstumpf überstehenden U-Lagerplattenteile abgeflext. Die Restlagerplatte ist eine auf beiden Seiten des Chassis vorhandene gute symmetrische Positioniermöglichkeit.
Jetzt kommt der Vorderrad-Emulator zum Einsatz. Das ist ein Holzklotz, der den Achsstumpf genau an der Position halten soll, den der Achsstumpf auch mit Rad haben wird - also waagerecht 5Zoll (Vorderräder haben 10 Zoll Durchmesser) über dem Boden. Mit einer anderen Holzschablone wird der "typische" Nachlauf eingestellt, den ich oben ermittelt hab.
Neeeee - das ist mein knowhow - das sag ich euch nicht. Neneneneneee. Ihr könnt's aber mal mit so um die ca. 7° probieren... ;-)


Ja - paßt. Alle Schrauben und Mutttern sind erreichbar für Werkzeuge und der Bewegungsraum beim Lenken ist anscheinend auch gegeben (Lenkschwenkwinkel ca. +25/-30°. Ups - schon wieder knowhow...). Na denn kann ja mal eine Punktung zur Probe gemacht werden.


Jetzt sind die Halteplatten für den Lagerbock angepunktet. Und vor allem hab ich gleich die andere Seite gemacht, wo mir die Ausrichtung des Chassis so viel Mühe gemacht hat.

Ansachließend werden die Lagerböcke längs durchgesägt.


Damit können die Schrauben den Lagerarm mittels Lagerbockhälften klemmen. Nun kommt der Verstellerli für den Nachlauf. Das wird eine Gewindebuckse, die an den Lagerarmen angeschweißt ist. In dieser wird eine Stellschraube mittels Mutter gekontert. Die Stellschraube soll eine feine Einstellung des Nachlaufes ermöglichen und außerdem eine zweite Sicherheit bieten, wenn die Klemmung des Lagerarmes bei ruckarzigen Bremsen oder Überfahren von Bodenerhebungen (manchmal sind das auch Curbs...tststs...) vielleicht doch etwas nachläßt oder schlupft. Das sollte bei dieser Dimensionierung (4xM8 mit selbstsichernden Muttern und eine Umfangsklemmlänge von 50mm) eigentlich nie passieren - aber man weiß ja nie...
Um den vollen Einstellbereich zu haben wird der Lagerarm so gedreht, daß der Nachlauf die untypischen Minimalextremwert "0" einnimmt. Dann tüftele ich ca. 15min, bis ich die "richtige" Neigung der Gewindebuchse (bei den typischen ca. 7° Nachlaufwinkel soll die Stellschraube senkrecht gegen das Gegenlager drücken, um seitliche Kräfte zu vermeiden) gefunden hab und außerdem eine Fixierung angebracht ist, die wenigstens einen einzigen Schweißpunkt ermöglicht.

Diese Klemmvorrichtung wird nicht nur für die homepage, sondern auch deshalb fotografiert, um sie am nächsten Tag auf der anderen Seite spiegelbildlich aufbauen zu können, denn es ist schon wieder Mitternacht...
Fertig. Beim Austesten des gesamten Stellfensters wird mir bewußt, daß das Chassis sich zwischen 3cm und 7cm vorn über dem Boden mitverstellt. Die Profis benutzen die Höhenverstellung des Chassis (im Bereich von 20mm) auch, um das Fahrverhalten zu beeinflussen. Ich kann mir allerdings fahrdynamisch nicht vorstellen, wie sich das auswirkt und warum. 20mm vorn entsprechen ca. 6-7mm im Bereich des Schwerpunktes. Also nee - das kann ich mir nicht vorstellen, daß das was bringt...
7cm - das ist fast "crossbahnverdächtig". Neee - wer fährt schon mit 0° Nachlauf und 5° positivem Sturz. Diesen Extrempunkt werde ich wohl nie benutzen... :-)

und durchgescheißt - aber unverputzt - sehen Achsstumpf und Lagerarm so aus...

Nachdem alle bisher gehefteten Teile duchgeschweißt und verputzt wurden baue ich alles zusammen. Klar, daß nun eine durchgehende provisorische Spurstange aus gewindestange und zwei Kugelköpfen gebaut und vor allem eingebaut wird, um die Vorderrädeer in Fahrtrichtung zu stellen. Sie würden ohne diese ja einfach so rumhängen. Wie sieht das denn aus...
***
Jetzt geht's an die Lenkgeometrie, die das Lenken ermöglichen soll. Es ist leicht erkennbar, daß bei diesem Kart-Konzept eine typische Kartlenkung mit der Mittellengsäule irgendwie nicht funktionieren wird. es müßte ein Loch durch den gesamten Motor gebohrt werden... Abgelehnt!

Es wird also eine Lösung werden, die "um den Motor herum" lenken wird. Das hört sich nach viel Mechanik an. Ich versuche also eine Lösung zu finden, die mit möglichst wenig teilen und kurzen Teilen auskommt, um die Dynamik dieser Konstruktion so klein, wie möglich zu halten. Je direkter die Lenkung, um so besser ist sie zu kontrollieren. Bei meinen Streifzügen durch div. Ersatzteillager und Kart-shops hab ich schon vor Urzeiten vorgesorgt. Ich greife also in meine Kiste und ziehe div. Kartlenkstangen hervor. Daraus finde ich schnell die vier passendsten für meinem Plan.
![]()
Es soll eine Lenkung werden, die an das Lenkstock-Prinzip angelehnt ist.
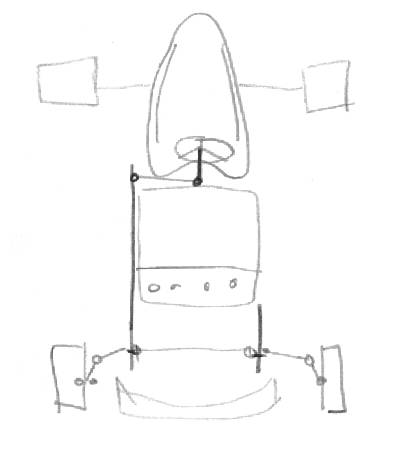
Da die Antriebskette nach realisiertem Antriebskonzept links schon an Chassis plaziert ist, wird dort der liegende Lenkstock angebracht. Rechts wird der Lenkführungsstock gelegt, der bis hinter den Motor reicht. Die beiden Lenkstöcke werden in der Mitte des Karts mit einer langen Spurstange verbunden, außen werden zwei kurze Spurstangen zu den Achsschenkeln gelegt. Aber erstmal schaue ich, ob die bisher gebauten Achsschenkel ausreichend Bewegungsraum haben. Das kurveninnere Rad muß ja weiter einschenken können als das kurvenäußere ausschwenken.


Scheint so. Der maximale Einschwenkwinkel beträgt so 18Grad. Hmmm. Reicht das? Damit könnte ich einen Kreis mit ca. 8,50m Durchmesser rollend fahren. Für mir bekannte Kartbahnen reicht das wohl aus. Obwohl - nach Befragen in unnserem Forum bekam schon den Tip, daß bestimmte Lenkmanöver zur beseren Kurvendurchfahrt deutlich mehr Lenkbewegung erfordern. Wobei das nun wieder vom Fahrstil des Piloten abhängt (Gegenlenken bei Übersteuern, Anreißen vor dem Kurveneingang). Ich mag ja solch materialforderndes Fahren nicht und traue meinem Bauchgefühl, daß es schon gehen wird. Obwohl... Nein - ich fange nicht an zu flexen - es bleibt so.
Ich baue mir passende Spurstangen. Die Lenkstöcke werden vorn mit einem liegend (so ist die größte Belastung in Richtung Schraubachse gelegt ;-) ) angebrachten Kugelgelenk vorn gehalten. Hinten wird ein Gewindeansatz axial eingeschweißt, auf dem zwei Kugellager angeschraubt werden. Diese Kugellager werden in ein Rohr möglichst spielfrei, aber doch gleitend eingesetzt. das Rohr wird am Chassis angeschweißt. Somit ist das Konstruktionsprinzip "Loslager-Festlager" verwendet worden, womit alle Lagerstellen nur in Hauptbelastungsrichtung belastet werden und bei zu erwartender Dynamik des Chassis nicht sperren oder klemmen.
![]()

Jetzt wird's spannend. Das Lenkrad muß plaziert werden. Die Sitzposition des Piloten erfordert eine Lankradposition, die so dicht am bauch und an den Oberschenkeln liegt, daß ein Aus- und Einsteigen nur mit viel Winden und Zwämgen möglich ist. Das ist schlecht, denn im Ernstfalle sollte der Pilot das Kart schnellstmöglich verlassen können. Alles, was länger als 5 Sekunden dauert, erscheint mir zu lange. Es bleibt nur eine Möglichkeit - das Lenkrad muß beim Ein- und Aussteigen seine Bedienposition verlassen. Ein Wegschwenken erscheint mir nach vielen Skizzen zu aufwendig und zu kompliziert zu realisieren. Ich konstruiere mir skizzenhaft eine Lenkradnabe, die ein Abnehmen des Lenkrades ermöglicht. Beim Suchen im Internet finde ich bald eine nabe, die meiner Konstruktion aber sowasvon ähnelt. Da war doch einr schneller als ich :-) Und da der Preis akzeptabel erscheint - kauf ich die. Ist zwar für den Crosseinsatz ausgeschrieben - aber was solls. Es gibt einen Außenring mit gefedertem Verriegelungsstift und einen Innensechskant zum Aufschweißen auf die Lenksäule.


Das passende Kartlenkrad hab ich schon. Klar daß die Befestigungslöcher nicht mit den Gewindesacklöchern übereinstimmen. Murphy wohnt ja inzwischen bei mir in der Werkstatt... Dann wird eben mal wieder umgearbeitet.


Jetzt kommt die Lenksäule auf den Arbeitsplan. Sie soll demontierbar sein und außerdem noch gut an beiden Enden gelagert werden. Denn schließlich beißt man schonmal ins Lenkrad, wenn es einen packt. Spielfrei soll's auch werden. Man kennt das ja, die Kartlenkradadapter mit bestimmt 1 mm größerem Lenksäulenaufnahmeloch, die mit einer Querschraube in der Lenksäule gesichert werden, arbeiten sich ihre Langlöcher in die Lenksäule. Spätestens nach einer Saison gibt's an dieser Stelle Lenkspiel. Also passe ich den oberen Lenksäulenstumpf spielfrei in die Lenksäule ein. Dann bohre ich zwei Löcher mit 5.9mm Durchmesser durch die Lenksäule. Weiter geht' später, wenn die gesamte Lenkmechanik ausgerichtet ist.


Nun wird der Lenkführungsstock gebaut. Er besteht aus zwei Kartlenksäulen, die winkelversetzt zusammengeschweißt werden. Dazu wird an der Stoßstelle ein Innenstück spielfrei eingepaßt, das ein Druchbiegen verhindert und nebenbei die Schweißnaht unterstützt.
![]()
Aber es wird auch hier noch nicht endgütig geschweißt - erst Ausrichten! Jetzt baue ich den Lenklagerhalter. Er besteht aus einem großen Ring, in dem das obere Lenklager sitzt, zwei Streben die diesen Ring halten und einem Steg, der das Kugelgelenkn für das untere Lanksäulenlager trägt. das alles wird dann mit viel Spanngurten an eine Position gebracht, die der späteren Bedienposition entspricht. ich hab nicht gezählt, wie oft ich in den Sitz gestiegen bin, bis ich die Position des Lenkrades gefunden habe. Jetzt werden die Lenkradlagerhalter angepunktet.



Die gesamte Lenkung wird jetzt auf Geradeauslauf gestellt. Der Lenkführungsstock wird hinten so gestellt, daß eine Lenkschubstange im rechten Winkel an den Drehhebel angreifen würde.

Bei der Lanksäule wird das auch so gemacht. Jetzt kann ich die Lenkschubstange ausmessen und bauen. Genauso, wie die Spurstangen.
![]()
Nachdem nun die gesamte Lenkmechanik ausgerichtet ist, wird fertiggeschweißt. Der Lenkführungsstock ist mir zu heikel mit nur einer stupfen Schweißnaht. Ich bohre einige Löcher und kann so am Umfang noch ein paar Schweißnähte legen, die die Rohre mit dem Innenstützstück verbinden. Da wird wohl nix kaputt gehen.


Jetzt ist auch die Lenksäule ausgerichtet. Ich bohre also die Löcher durch. Danach schlitze ich die Lenksäule. Jetzt kann ich sie mit den beiden M6-Schrauben spielfrei und voll klemmend mit dem Lenkstumpf verbinden. Ich erwarte hier kein "Speilrütteln" mehr.
![]()

Nun die gesamte Lenkmechanik schön zusammenstecken und verschrauben. Zuletzt noch das Lenkrad draufgesteckt.

Jetzt kann ich die Lenkeinschlaggrenzen und die Mittellage justieren und überprüfen. Erst die Mittellage ausjustieren. Dabei wird das Lenkrad in Neutrallage gebracht und die Lenkstöcke werden in die gedachte Neutrallage gedreht. Dann werden die Spurtstangen und die Lenkschubstangen eingebaut und auf die ausgerichteten Lenkstöcke angepaßt. Die erforderlichen Längen werden durch Drehen der Kugelköpfe auf den Gewindezapfen erreicht. Mit einer Mutter wird dann leicht gekontert.
Jetzt probiere ich die Anschläge rechts und links anzufahren. Am Lenkrad kontrolliere ich, daß die Lenkeinschläge beidseitig gleichgroß sind. Das kommt gut hin. Naja, Augenmaß muß reichen. Das ist am Lenkrad ausreichend genau. Die Lenkeinschläge an den Rädern kontrolliere ich schon genauer. Dazu stelle ich den Sturz und Nachlaufwinkel beidseitig akribisch gleich ein. Dann drehe ich nach recht zum Anschlag und nehme mit einer Schmiege den Einschlagwinkel senkrecht zum Chassis ab. (vorn quer zum Chassis liegt eine Schiene). Nun nach links und mittels der Schmiege die Abweichung kontrollieren. Dabei entdecke ich ein paar Unsymmetrien an den geschweißten Hebeln, die die Symmetrie der Lenkbewegungen verhindern. Das wird mittels Flex behoben.
Und dann stimmt's fast. Ich justieren noch etwas an den Kugelköpfen nach. Jetzt stimmt auffallend genau. Nach Schmiegenspalt und Werkzeugmacheraugenmaß unter einem Grad. Super.
Und hier kann man die Mechanik in Aktion sehen. Die paar Heftpunkte werden durchgeschweißt, wenn ich mal wieder bei Andi bin.



Damit ist die Lenkmechanik fertig. Ich probiere nun noch aus, ob und welche Dinge anders sind, wenn ich den gesamten (sinnvollen) Einstellbereich (Sturz und Nachlaufwinkel) mal stichpunktartig einstelle. Dabei bemerke ich, daß meine Vermutung war wird. Sobald ich am Sturz oder am Nachlaufwinkel stelle, ändert sich der Spurwinkel spürbar. Das ist natürlich echt doof, denn es erfordert immer viel Nachjustage, wenn ich mir die möglichst optimalen Werte für Sturz und Nachlaufwinkel auf der Strecke ausprobieren möchte. (Bei EVO-3 geht das schneller, weil da der Sturz nicht einstellbar ist und die Spurstangen so lang sind, daß Nachlaufwinkeleinstellungen hier kaum einen geometrischen Einfluß haben). Na gut.
Und hier sieht man die Lenkgeometrie mal nachdem ich EVO-4 über Winter mal im Keller stehen hatte. Das Chassis ist komplett, nur der Motor ist raus. So sieht man das Gedrehe und Geschwenke mal vollständig.

Nicht alles ist eben opitimal. Dafür ist die Lenkmechanik von EVO-4 wohl im Kartbereich einzigartig ;-)
***
![]()